
SDP - semidefinite programming
s.t.
Ax = b,
with
where , and are symmetric matrices. The inequality sign in means that is positive semidefinite, i.e. for all . We call the inequality a linear matrix inequality (LMI) and the problem is given the name of semidefinite program (it is a convex optimization problem since its objective and constraints are convex).
See S.Boyd and L.Vandenberghe, "Convex Optimization", p. 168 for a more formal definition and details.
You can use the Barrier Method algorithm available with Solver4J for solving this type of problems, passing in the generalized barrier function for the positive semidefinite cone as the barrier function (see S.Boyd and L.Vandenberghe, "Convex Optimization", p. 600):
with . For strictly feasible x the gradient is equal to
and the hessian is
This function is represented in Solver4J with the class SDPLogarithmicBarrier.
Code example
Here we want to solve a QCQP we already know the solution of as a SDP.In order to proceed, we first observe (see S.Boyd and L.Vandenberghe, "SEMIDEFINITE PROGRAMMING", SIAM REVIEW Vol. 38, No. 1, pp. 49-95, March 1996) that a convex quadratic constraint , with , can be written as
The left hand side is an affine function of x, and can be expressed as
with
( are the columns of )
It follows that a QCQP s.t.
,
,
can be rewritten as s.t.
,
,
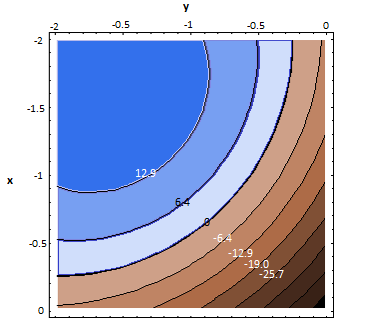
.Keeping all this in mind, we now want to find the solution of this QCQP
s.t.
// Objective function (variables (x,y,t), dim = 3)
double[] c = new double[]{0,0,1};
LinearMultivariateRealFunction objectiveFunction = new LinearMultivariateRealFunction(c, 0);
//constraint in the form (A0.x+b0)T.(A0.x+b0) - c0.x - d0 - t < 0
double[][] A0 = new double[][]{
{-Math.sqrt(21./50.), 0. , 0},
{-Math.sqrt(2)/5. , -1./Math.sqrt(2), 0}};
double[] b0 = new double[] { 0, 0, 0 };
double[] c0 = new double[] { 0, 0, 1 };
double d0 = 0;
//constraint (this is a circle) in the form (A1.x+b1)T.(A1.x+b1) - c1.x - d1 < 0
double[][] A1 = new double[][]{{1,0,0},
{0,1,0}};
double[] b1 = new double[] { 2, 2, 0 };
double[] c1 = new double[] { 0, 0, 0 };
double d1 = Math.pow(1.75, 2);
//matrix G for SDP
double[][] G = new double[][]{
{1 ,0 ,b0[0] ,0 ,0 ,0},
{0 ,1 ,b0[1] ,0 ,0 ,0},
{b0[0] ,b0[1] ,d0 ,0 ,0 ,0},
{0 ,0 ,0 ,1 ,0 ,b1[0]},
{0 ,0 ,0 ,0 ,1 ,b1[1]},
{0 ,0 ,0 ,b1[0] ,b1[1] ,d1}};
//matrices Fi for SDP
double[][] F1 = new double[][]{
{0 ,0 ,A0[0][0] ,0 ,0 ,0},
{0 ,0 ,A0[1][0] ,0 ,0 ,0},
{A0[0][0] ,A0[1][0] ,c0[0] ,0 ,0 ,0},
{0 ,0 ,0 ,0 ,0 ,A1[0][0]},
{0 ,0 ,0 ,0 ,0 ,A1[1][0]},
{0 ,0 ,0 ,A1[0][0] ,A1[1][0] ,c1[0]}};
double[][] F2 = new double[][]{
{0 ,0 ,A0[0][1] ,0 ,0 ,0},
{0 ,0 ,A0[1][1] ,0 ,0 ,0},
{A0[0][1] ,A0[1][1] ,c0[1] ,0 ,0 ,0},
{0 ,0 ,0 ,0 ,0 ,A1[0][1]},
{0 ,0 ,0 ,0 ,0 ,A1[1][1]},
{0 ,0 ,0 ,A1[0][1] ,A1[1][1] ,c1[1]}};
double[][] F3 = new double[][]{
{0 ,0 ,A0[0][2] ,0 ,0 ,0},
{0 ,0 ,A0[1][2] ,0 ,0 ,0},
{A0[0][2] ,A0[1][2] ,c0[2] ,0 ,0 ,0},
{0 ,0 ,0 ,0 ,0 ,A1[0][2]},
{0 ,0 ,0 ,0 ,0 ,A1[1][2]},
{0 ,0 ,0 ,A1[0][2] ,A1[1][2] ,c1[2]}};
double[][] GMatrix = new Array2DRowRealMatrix(G).scalarMultiply(-1).getData();
List<double[][]> FiMatrixList = new ArrayList<double[][]>();
FiMatrixList.add(FiMatrixList.size(), new Array2DRowRealMatrix(F1).scalarMultiply(-1).getData());
FiMatrixList.add(FiMatrixList.size(), new Array2DRowRealMatrix(F2).scalarMultiply(-1).getData());
FiMatrixList.add(FiMatrixList.size(), new Array2DRowRealMatrix(F3).scalarMultiply(-1).getData());
//optimization request
OptimizationRequest or = new OptimizationRequest();
or.setF0(objectiveFunction);
//or.setInitialPoint(new double[] { -0.8, -0.8, 10});
//optimization
BarrierFunction bf = new SDPLogarithmicBarrier(FiMatrixList, GMatrix);
BarrierMethod opt = new BarrierMethod(bf);
opt.setOptimizationRequest(or);
opt.optimize();
double[] sol = opt.getOptimizationResponse().solution; sol[0] = -2 + 1.75/Math.sqrt(2) sol[1] = -2 + 1.75/Math.sqrt(2) sol[2] = 0.8141035444;
Standard form
A SDP is said to be in standard form if it is staded as s.t.
with
see "S.Boyd and L.Vandenberghe, Convex Optimization" example 11.11. Given a problem in standard form, it is simple to formulate and solve it with Solver4J, as shown in the following example.Code example
//definition of the standard form entities
int p = 2;
double[][] C = new double[][]{{2, 1}, {1, 3}};
double[][] A1 = new double[][]{{2, 1}, {1, 2}};
double[][] A2 = new double[][]{{5, 2}, {2, 5}};
double[] b = new double[]{4, 10};
//Solver4J formulation: the variables are the 3 distinctive elements of the symmetric 2x2 matrix X:
//double[][] X = new double[][]{{x00, x01}, {x01, x11}};
// Objective function: Tr(C, X)
double[] trCX = new double[]{2, 2, 3};//2*x00 + 2*x01 + 3*x11
LinearMultivariateRealFunction objectiveFunction = new LinearMultivariateRealFunction(trCX, 0);
// Linear equalities constraints: Tr(A_i, X) = b_i, i=1,2
double[][] EQcoeff = new double[2][3];
double[] eqLimits = new double[2];
EQcoeff[0] = new double[]{2, 2, 2};//2*x00 + 2*x01 + 2*x11 (Tr(A1, X))
EQcoeff[1] = new double[]{5, 4, 5};//5*x00 + 4*x01 + 5*x11 (Tr(A2, X))
eqLimits[0] = b[0];
eqLimits[1] = b[1];
// Linear matrix inequality, i.e X must be semidefinite positive:
//for this, we decompose X into its components relative to the standard basis of S.
//The standard basis in the subspace of symmetric matrices S consist of n matrices
//that have one element = 1 on the main diagonal (the rest of the elements are 0) and
//(n-1)+(n-2)+...+2+1 = (n-1)n/2 matrices that have two elements equal 1, the elements
//that are placed symmetrically with respect to the main diagonal (remember that
//symmetric matrices have aij = aji, i!=j)
double[][] F0 = new double[][]{
{0 ,0 },
{0 ,0 }};
//matrices Fi for SDP: they are the elements of the standard basis of S
double[][] F1 = new double[][]{
{1,0},
{0,0 }};
double[][] F2 = new double[][]{
{0,1},
{1,0 }};
double[][] F3 = new double[][]{
{0,0},
{0,1 }};
double[][] GMatrix = new Array2DRowRealMatrix(F0).scalarMultiply(-1).getData();
List<double[][]> FiMatrixList = new ArrayList<double[][]>();
FiMatrixList.add(FiMatrixList.size(), new Array2DRowRealMatrix(F1).scalarMultiply(-1).getData());
FiMatrixList.add(FiMatrixList.size(), new Array2DRowRealMatrix(F2).scalarMultiply(-1).getData());
FiMatrixList.add(FiMatrixList.size(), new Array2DRowRealMatrix(F3).scalarMultiply(-1).getData());
//optimization request
OptimizationRequest or = new OptimizationRequest();
or.setF0(objectiveFunction);
or.setInitialPoint(new double[] { 1, 0, 1});
//or.setNotFeasibleInitialPoint(new double[] { 1, 0, 1});
or.setCheckKKTSolutionAccuracy(true);
or.setA(EQcoeff);
or.setB(eqLimits);
//optimization
BarrierFunction bf = new SDPLogarithmicBarrier(FiMatrixList, GMatrix);
BarrierMethod opt = new BarrierMethod(bf);
opt.setOptimizationRequest(or);
opt.optimize();
double[] sol = opt.getOptimizationResponse().solution; sol[0] = 2; sol[1] = 0; sol[2] = 0;