
QCQP - quadratically constrained quadratic programming
minimizex (1/2)xTP0x+q0T+r0 s.t.
(1/2)xTPix+qiT+ri ≤ 0, i=1,...,m
Ax = b,
where Pi ∈ S+n, i=0,...,m, and A ∈ RpXn
is called a quadratically constrained quadratic program (QCQP). Quadratically constrained quadratic program include quadratic program as a special case by taking Pi=0 for i=1,...,m.
2D example
Consider the problem graphically represented hereafter: 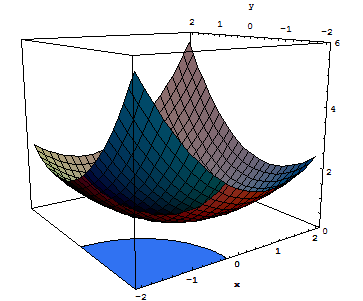
// Objective function
double[][] P = new double[][] { { 1., 0.4 },{ 0.4, 1. }};
PDQuadraticMultivariateRealFunction objectiveFunction = new PDQuadraticMultivariateRealFunction(P, null, 0);
//inequalities
ConvexMultivariateRealFunction[] inequalities = new ConvexMultivariateRealFunction[1];
inequalities[0] = FunctionsUtils.createCircle(2, 1.75, new double[]{-2, -2});
//optimization problem
OptimizationRequest or = new OptimizationRequest();
or.setF0(objectiveFunction);
or.setInitialPoint(new double[] { -2., -2.});
or.setFi(inequalities);
or.setCheckKKTSolutionAccuracy(true);
//optimization
Solver4J opt = new Solver4J();
opt.setOptimizationRequest(or);
opt.optimize();
double[] sol = opt.getOptimizationResponse().solution; sol[0] = -2 + 1.75/Math.sqrt(2) sol[1] = -2 + 1.75/Math.sqrt(2)